Contenido.
- Estándares y unidades.
- Consistencia y conversiones de unidades.
- Incertidumbre y cifras significativas.
- Estimaciones y órdenes de magnitud.
- Magnitudes, Vectores, Sistemas de coordenadas y Suma de vectores.
- Producto de vectores.
- Ejercicios / Problemas.

Metas de Aprendizaje
|
Al estudiar esta unidad usted aprenderá:
|
1. Estándares y unidades.
1.1 Estándares.
 |
| Figura 1: Uso de Calibrador Vernier. |
Ejemplo: Medir una distancia con una regla, o un lapso de tiempo con un
cronómetro.
Ahora, definimos una cantidad física describiendo la forma de calcularla a partir de otras cantidades medibles. Así, podríamos definir la rapidez promedio de un objeto en movimiento, como la distancia recorrida (medida con una regla) entre el tiempo de recorrido (medido con un cronómetro).
Ahora, definimos una cantidad física describiendo la forma de calcularla a partir de otras cantidades medibles. Así, podríamos definir la rapidez promedio de un objeto en movimiento, como la distancia recorrida (medida con una regla) entre el tiempo de recorrido (medido con un cronómetro).
Al medir una cantidad, siempre la comparamos con un estándar de referencia.
Si decimos que un Porsche Carrera GT tiene una longitud de 4.61 m, queremos
decir que es 4.61 veces más largo que una vara de metro, que por definición
tiene 1 m de largo.
Dicho estándar define una unidad de la cantidad. El metro es una unidad de
distancia; y el segundo, de tiempo. Al describir una cantidad física con un
número, siempre debemos especificar la unidad empleada; describir una distancia
simplemente como “4.61” no tendría significado. Las mediciones exactas y
confiables requieren unidades inmutables que los observadores puedan volver a
utilizar en distintos lugares.
 |
| Figura 2: Medición del tiempo (reloj de arena) |
Tiempo.
De 1889 a 1967, la unidad de tiempo se definió como cierta fracción del día
solar medio (el tiempo promedio entre llegadas sucesivas del Sol al cenit). El
estándar actual, es mucho más preciso; se basa en un reloj atómico que usa la
diferencia de energía entre los dos estados energéticos más bajos del átomo de
cesio.
Al bombardearse con microondas de cierta frecuencia exacta, el átomo de cesio sufre una transición entre dichos estados. Un segundo (que se abrevia como s) se define como el tiempo que tardan 9,192,631,770 ciclos de esta radiación de microondas.
Al bombardearse con microondas de cierta frecuencia exacta, el átomo de cesio sufre una transición entre dichos estados. Un segundo (que se abrevia como s) se define como el tiempo que tardan 9,192,631,770 ciclos de esta radiación de microondas.
Longitud
En 1960 se estableció también un estándar atómico para el metro, utilizando
la longitud de onda de la luz anaranjada-roja emitida por átomos de kriptón
(86Kr) en un tubo de descarga de luz. Usando este estándar de longitud, se
comprobó que la rapidez de la luz en el vacío era de 299,792,458 m/s. En
noviembre de 1983, el estándar de longitud se modificó otra vez, de manera que
la rapidez de la luz en el vacío fuera, por definición, exactamente de
299,792,458 m/s. El metro se define de modo que sea congruente con este número
y con la definición anterior del segundo. Así, la nueva definición de metro
(que se abrevia m) es la distancia que recorre la luz en el vacío en
1/299,792,458 segundos. Éste es un estándar de longitud mucho más preciso que
el basado en una longitud de onda de la luz.
Masa
 |
| Figura 3: Estándar de masa (platino-iridio) |
1.2 Sistemas de unidades.
1.2.1 Sistema c.g.s.
Sistema Cegesimal de Unidades, también llamado sistema cgs, es un sistema de unidades basado en el centímetro, el gramo y el segundo. Su nombre es el acrónimo de estas tres unidades. Este sistema se ha reemplazado por el Sistema Internacional de Unidades. Sin embargo, en algunos campos científicos su uso es muy ventajoso en algunos contextos. Así, muchas de las fórmulas del electromagnetismo presentan una forma mas sencilla cuando se las expresa en unidades cgs.
Magnitud
|
Nombre
|
Símbolo
|
Definición
|
Equivalencia
en SI
|
Longitud
|
centímetro
|
cm
|
0,01 m
|
|
Masa
|
gramo
|
g
|
0,001 kg
|
|
tiempo
|
segundo
|
s
|
1 s
|
|
Aceleración
|
gal
|
Gal
|
cm/s2
|
0,01 m/s2
|
Fuerza
|
dina
|
dyn
|
g.cm/s2
|
10-5 N
|
Energía
|
ergio
|
erg
|
dyn cm
|
10-7 J
|
Potencia
|
ergio por segundo
|
erg s-1
|
10-7 W
|
|
Presión
|
baria
|
baria
|
dyn/cm2
|
0,1 Pa
|
Viscosidad dinámica
|
poise
|
P
|
g (cm s)-1
|
0,1 Pa s
|
Viscosidad cinemática
|
stokes
|
St
|
cm2s-1
|
10-4 m2s-1
|
Carga eléctrica
|
franklin o estatculombio
|
Fr
|
dyn½cm
|
3,336 641×10-10 C
|
Potencial eléctrico
|
estatvoltio
|
statV
|
erg Fr-1
|
299,7925 V
|
Campo eléctrico
|
estatvoltio por cm
|
statV cm-1
|
||
Flujo magnético
|
maxwell
|
Mx
|
G cm2
|
10-8 Wb
|
Densidad de flujo magnético
|
gauss
|
Gs, G
|
Mx cm-2
|
10-4 T
|
Intensidad de campo magnético
|
oersted
|
Oe
|
(103/4π) A/m
|
|
Intensidad de corriente
|
estatamperio
|
statA
|
3.335 641 × 10-10 A
|
|
Resistencia
|
estatohmio
|
statΩ
|
8.987 552 × 1011 Ω
|
|
Capacidad eléctrica
|
estatfaradio o «centímetro»
|
«cm»
|
1,113 × 10-12 F
|
|
Inductancia
|
estathenrio
|
statH
|
8,988 × 1011 H
|
1.2.2 Sistema inglés.
El Sistema
Inglés de unidades son las unidades no-métricas que se utilizan actualmente en
los Estados Unidos y en muchos territorios de habla inglesa (como en el Reino
Unido), pero existen discrepancias entre los sistemas de Estados Unidos e
Inglaterra. Este sistema se deriva de la evolución de las unidades locales a
través de los siglos, y de los intentos de estandarización en Inglaterra.
Hoy en día,
estas unidades están siendo lentamente reemplazadas por el Sistema
Internacional de Unidades, aunque en Estados Unidos la inercia del antiguo
sistema y el alto costo de migración ha impedido en gran medida el cambio.
Longitud
|
Masa
|
Volumen
|
1 milla = 1.609 m
|
1 libra = 0.454 kg.
|
1 yarda3 = 0,765 m3
|
1 yarda = 0.915 m
|
1 onza = 0.02835 kg.
|
1 pie3 = 0,02832 m3
|
1 pie = 12 pulg = 0,3048 m
|
1 ton. Inglesa = 907 kg.
|
1 pulg3 =
0,0000164 m3
|
1 pulgada = 0.0254 m
|
1 galón = 3,785 L
|
|
1 mil = 25,4 μm
|
1.2.3 Sistema Internacional SI.
El sistema de unidades empleado por los científicos e ingenieros en todo el mundo se denomina comúnmente “sistema métrico” aunque, desde 1960, su nombre oficial es Sistema Internacional, o SI.
A continuación, se presenta una tabla con las unidades y prefijos del
Sistema Internacional (SI) desarrollado por la Conferencia General de Pesos y
Medidas.
Unidades
básicas del SI
|
||
Magnitud
|
Nombre de
la unidad
|
Símbolo de
la unidad
|
Longitud
|
Metro
|
m
|
Masa
|
Kilogramo
|
kg
|
Tiempo
|
Segundo
|
s
|
Corriente eléctrica
|
Ampere
|
a
|
Temperatura termodinámica
|
Kelvin
|
k
|
Cantidad de sustancia
|
Mol
|
mol
|
Intensidad luminosa
|
Candela
|
cd
|
Unidades
derivadas del SI
|
||
Área
|
metro cuadrado
|
m2
|
Volumen
|
metro cúbico
|
m3
|
Frecuencia
|
hertz
|
Hz
|
Densidad de masa (densidad)
|
kilogramo por metro cúbico
|
Kg/ m3
|
Rapidez, velocidad
|
metro por segundo
|
m/s
|
Velocidad angular
|
radián por segundo
|
rad/s
|
Aceleración
|
metro por segundo cuadrado
|
m/ s2
|
Aceleración angular
|
radián por segundo cuadrado
|
rad/ s2
|
Fuerza
|
newton
|
N
|
Presión (esfuerzo mecánico)
|
pascal
|
Pa
|
Viscosidad cinemática
|
metro cuadrado por segundo
|
m2/s
|
Viscosidad dinámica
|
newton-segundo por metro cuadrado
|
N.s/ m2
|
Trabajo, energía, cantidad de
calor
|
joule
|
J
|
Potencia
|
watt
|
W
|
Cantidad de electricidad
|
coulomb
|
C
|
Diferencia de potencial, fuerza
electromotriz
|
volt
|
V
|
Intensidad de campo
eléctrico
|
volt por metro
|
V/m
|
Resistencia eléctrica
|
ohm
|
Ω
|
Capacitancia
|
farad
|
F
|
Flujo magnético
|
weber
|
Wb
|
Inductancia
|
henry
|
H
|
Densidad de flujo magnético
|
tesla
|
T
|
Intensidad de campo magnético
|
ampere por metro
|
A/m
|
Flujo luminoso
|
lumen
|
lm
|
Entropía
|
Joule por kelvin
|
J/K
|
Capacidad de calor
específico
|
Joule por kilogramo-kelvin
|
J/ kg.K
|
Conductividad térmica
|
Watt por metro-kelvin
|
W/ m.K
|
Prefijo
|
Símbolo
|
Factor
|
yotta
|
Y
|
1024 (un
cuatrillón)
|
zetta
|
Z
|
1021 (mil
trillones)
|
exa
|
E
|
1018 (un trillón)
|
peta
|
P
|
1015 (mil
billones)
|
tera
|
T
|
1012 (un billón)
|
giga
|
G
|
109 (mil millones)
|
mega
|
M
|
106 (un millón)
|
miria
|
ma
|
104 (diez mil)
|
kilo
|
k
|
103 (mil)
|
hecto
|
h
|
102 (cien)
|
deca
|
da
|
101 (diez)
|
deci
|
d
|
10-1 (un décimo)
|
centi
|
c
|
10-2 (un
centésimo)
|
mili
|
m
|
10-3 (un milésimo)
|
micro
|
µ
|
10-6 (un
millonésimo)
|
nano
|
n
|
10-9 (un milmillonésimo)
|
pico
|
p
|
10-12 (un
billonésimo)
|
femto
|
f
|
10-15 (un
milbillonésimo)
|
atto
|
a
|
10-18 (un
trillonésimo)
|
zepto
|
z
|
10-21 (un
miltrillonésimo)
|
yocto
|
y
|
10-24 (un cuatrillonésimo)
|
2. Consistencia y conversiones de unidades.
2.1 Conversión de unidades
La conversión de unidades, es la transformación del valor numérico de un magnitud física, expresado en una unidad de medida, en otro valor numérico equivalente y expresado en otra unidad de medida de la misma naturaleza. Este proceso suele realizarse con el uso de los factores de conversión y/o tablas de conversión de unidades.
frecuentemente, basta multiplicar por una fracción (factor de una conversión) y el resultado es otra medida equivalente, en la que han cambiado las unidades. Cuando el cambio de unidades implica la transformación de varias unidades, se pueden utilizar varios factores de conversión uno tras otro, de forma que el resultado final será la medida equivalente en las unidades que buscamos.
Tabla de
conversión de unidades
|
||
Magnitud
|
Unidad
|
Conversiones
|
longitud
|
metro
(m)
|
1 m =
100 cm = 1000 mm
1 m =
3,281 pies (ft)
1 ft =
12 pulgadas (in)
1 in =
0,0254 m
|
volumen
|
1 m3
= 1000 litros
1 m3
= 35,32 ft3 = 264,17 galones
|
|
masa
|
kilogramo
(Kg)
|
1 kg =
1000 g = 0,001 toneladas
1 kg =
2,205 lb
1 lb =
16 onzas
|
fuerza
|
newton
(N)
|
1 N = 1
kg-m/s2 = 105 dinas (g-cm/s2)
1 N =
0,1020 kgf = 0,2248 lbf
1 kgf =
2,205 lbf
|
energía
|
joule
(J)
|
1 J = 1
N-m = 1 W-s = 107 erg (dina-cm)
1 J =
0,7376 lbf-ft = 2,78 *10-7 KWH
1 J =
0,2389 calorías = 9,48 *10-4 BTU
1 BTU =
252 calorías
|
potencia
|
watt (W)
|
1 W = 1
J/s
1 W =
1,34*10-3 caballos (hp)
1 hp =
76,1 kgf-m/s
|
presión
|
pascal
(Pa)
|
1 Pa = 1
N/ m2 = 10 dina/cm2 = 10-5 bar
1 Pa =
0,1020 kgf/cm2 = 1,45*10-4 psi
1 Pa =
9,9*10-6 atm
1 atm =
101,325 KPa
1 atm =
14,7 psi = 1,030 kgf/cm2
1 Pa =
760 torr = 760 mmHg
|
densidad
|
1 Kg/m3
= 0,001 g/cm3
1 Kg/m3
= 0,06243 lb/ft3
|
|
viscosidad
dinámica
|
(Pa-s)
|
1 Pa-s =
1 kg/m-s = 10 poise
1 poise
= 1 g/cm-s = 100 cp
1 mPa-s
= 1 cp
1 Pa-s =
0,1020 kgf-s/m2
1 Pa-s =
0,02089 lbf-s/ ft2
|
viscosidad
cinemática
|
(stoke)
|
1 stoke
= 1 cm2/s = 100 centistoke
1 stoke
= 10-4 m2/s
|
velocidad
angular
|
1 rad/s
= 60/2π RPM
|
|
diferencia
de temperaturas
|
1 ºC = 1
ºK = 1,8 ºF = 1,8 ºR
|
|
escalas
de temperatura
|
T (ºF) =
1,8 T (ºC) + 32
T (K) =
T (ºC) + 273,15
T (ºR) =
T (ºF) + 459,6
|
|
constante
universal de los gases
|
R =
1,987 BTU / lbmol - ºR
R =
82,06 atm- cm3 / mol-K
R =
8,314 N/m2 - m3 / mol-K
|
|
aceleración
de gravedad
|
g = 9,8
m/s2
g =
32,17 ft/s2
|
|
2.2 Factores
de conversión.
Es un método de conversión, donde el numerador y el denominador son cantidades iguales expresadas en unidades de medida distintas y se basa en multiplicar por una o varias fracciones de tal manera, que cada fracción equivale a la unidad.
Es un método de conversión, donde el numerador y el denominador son cantidades iguales expresadas en unidades de medida distintas y se basa en multiplicar por una o varias fracciones de tal manera, que cada fracción equivale a la unidad.
Ejemplo
1:
El
diamante tallado más grande del mundo es la Primera Estrella de África (montada
en el cetro real británico y guardado en la Torre de Londres). Su volumen es de
1,84 pulgadas cúbicas. ¿Cuál será su volumen en centímetros cúbicos? ¿Y en
metros cúbicos?

Ejemplo 2:
El récord mundial en 100 metros lisos lo consiguió Usain Bolt en el año
2009 con 9,58 segundos durante el campeonato mundial de Berlín. Exprese esta rapidez en Km/h.

3. Incertidumbre y cifras significativas
 |
| Figura 4: Incertidumbre de medición. |
3.1 Incertidumbre
El Vocabulario Internacional de Meteorología (VIM) define la incertidumbre de medida como un parámetro, asociado al resultado de una medición, que caracteriza la dispersión de los valores que razonablemente podrían ser atribuidos al mesurando.
Todas las mediciones tienen asociada una incertidumbre que puede deberse a los siguientes factores:
v Naturaleza de la
magnitud que se mide.
v Instrumento de
medición.
v El observador.
v Condiciones
externas.
Cada
uno de estos factores constituye por separado una fuente de incertidumbre y
contribuye en mayor o menor grado a la incertidumbre total de la medida. La
tarea de detectar y evaluar las incertidumbres no es simple e implica conocer
diversos aspectos de la medición.
En
principio, es posible clasificar las fuentes de incertidumbres en dos conjuntos
bien diferenciados, las que se deben a:
- Errores accidentales o aleatorios, que aparecen cuando mediciones repetidas de la misma variable dan valores diferentes, con igual probabilidad de estar por arriba o por debajo del valor real. Cuando la dispersión de las medidas es pequeña se dice que la medida es precisa.
- Errores sistemáticos, que son una desviación constante de todas las medidas ya sea siempre hacia arriba o siempre hacia abajo del valor real y son producidos, por ejemplo, por la falta de calibración del instrumento de medición.
En esta figura podemos diferenciar los errores sistemáticos y errores
aleatorios. Los
centros de los círculos indican la posición del valor que se quiere medir y las
cruces indican los valores de varias mediciones.
La
dispersión de los puntos se asocia a la precisión y su centro efectivo está
asociado a la exactitud.
a) Precisa pero inexacta.
b) Más exacta y más precisa.
c) Menos precisa y menos exacta.
d) Exacta pero menos precisa.
 |
| Figura 5: Ilustración esquemática de los conceptos de precisión y exactitud |
3.2 Cifras significativas
Las cifras significativas representan el uso de una o mas escalas de incertidumbre en determinadas aproximaciones. También, cuando queremos expresar una medida con un determinado número de cifras significativas deben seguirse las siguientes reglas:
Las cifras significativas representan el uso de una o mas escalas de incertidumbre en determinadas aproximaciones. También, cuando queremos expresar una medida con un determinado número de cifras significativas deben seguirse las siguientes reglas:
Regla
|
Ejemplo
|
Son
significativos todos los dígitos distintos de cero.
|
8321 tiene cuatro cifras significativas.
|
Los ceros
situados entre dos cifras significativas son
significativos.
|
104 tiene tres cifras significativas.
|
Los ceros
a la izquierda de la primera cifra significativa no lo son.
|
0,005 tiene una cifra significativa.
|
Cuando la cifra
a redondear, le sigue 5 se considera si es par o impar.
Si es
impar se incremente en 1 dígito y si es par se deja igual.
|
12,35 por lo tanto, se incrementa quedando 12,4.
12,25 por ser par se mantiene su valor y queda 12,2.
|
Para
números mayores que 1, los ceros a la derecha de la coma son significativos.
|
8,00 tiene tres cifras significativas.
|
Para
números sin coma decimal, los ceros posteriores a la última cifra distinta de
cero pueden o no considerarse significativos. Así, para el número 70 podríamos
considerar una o dos cifras significativas. Esta ambigüedad se
evita utilizando la notación científica.
|
7·102 tiene una cifra significativa.
7,0·102 tiene dos cifras significativas. |
4. Estimaciones y órdenes de magnitud
 |
| Figura 6: Diferentes órdenes de magnitud de volumen. |
Destacamos la importancia de conocer la precisión y exactitud de los números que representan cantidades físicas. Pero, a menudo incluso una estimación burda de una cantidad puede darnos información útil. Normalmente, sabemos cómo calcular cierta cantidad, pero tenemos que estimar los datos necesarios para el cálculo. De vez en cuando, el cálculo suele ser demasiado complicado para efectuarse con exactitud, así que lo aproximamos. En ambos casos, nuestro resultado es una estimación, pero nos servirá aun si tiene un factor de incertidumbre de dos, diez o mas. Estos cálculos, se denominan estimaciones de orden de magnitud. El gran físico italo-estadounidense Enrico Fermi (1901-1954) los llamaba "cálculos del reverso de un sobre".
Ejemplo:
Estimación de orden de magnitud
Supongamos que una persona huye a otro país con mil millones de dólares
en oro en la maleta. ¿Es posible esto? ¿Cabría tanto oro en una maleta?
Solución.
El oro se vende a unos 1200 dólares la onza; aunque el precio varía entre
1100 y 1300 dólares. Una onza equivale a unos 28 g. por lo tanto, podemos
suponer que 40 dólares es aproximadamente 1 g. Así que mil millones (109)
de dólares en oro representan 2,5*107 de gramos, que corresponden a
25 toneladas.
Es evidente que esto no es posible y que tanto oro no puede caber en una
maleta
5. Magnitudes, Vectores, Sistemas de Coordenadas y Suma de vectores
 |
| Figura 7: Probeta con líquidos de diferentes densidades. |
5.1 Magnitud escalar
Otras cantidades de la Física y de las ciencias se caracterizan por tener solo magnitud, por ejemplo, la masa (10 kg), longitud (15 m) y temperatura (300 K). A estas cantidades se las denomina magnitudes escalares, para diferenciarlas de las magnitudes vectoriales. Sin embargo, debe recalcarse que aparte de tener unidades tales como kilogramos, metro grados, los escalares no son mas que números reales. Por eso es posible denotarlos con letras comunes.
Hay cantidades en Física y en otras ciencias que para poder ser definidas
deben tener magnitud, dirección y sentido, tales como desplazamiento,
velocidad, fuerza, aceleración, campo eléctrico.
 |
| Figura 8: Campo eléctrico producido por un conjunto de cargas puntuales. |
5.3 Vector
5.3.1 Características
de un vector.
Un vector, tiene tres características principales:
Módulo: longitud
del segmento.
Dirección:
orientación de la recta (ángulo).
Sentido: indica
cual es el punto de aplicación y el punto final de la recta.
 |
| Figura 9: Características de un vector. |
5.3.2
Clasificación de vectores
Según los
criterios que se utilicen para determinar la igualdad o equipolencia de dos vectores, pueden
distinguirse distintos tipos de los mismos:
- Vectores libres: no están aplicados en ningún punto en particular.
- Vectores deslizantes: su punto de aplicación puede deslizar a lo largo de su recta de acción.
- Vectores fijos o ligados: están aplicados en un punto en particular.
- Vectores concurrentes o angulares: son aquellas cuyas direcciones o líneas de acción pasan por un mismo punto. También se les suele llamar angulares porque forman un ángulo entre ellas.
- Vectores opuestos: vectores de igual magnitud y dirección, pero sentidos contrarios. En inglés se dice que son de igual magnitud, pero direcciones contrarias, ya que la dirección también indica el sentido.
- Vectores colineales: los vectores que comparten una misma recta de acción.
- Vectores paralelos: si sobre un cuerpo rígido actúan dos o más fuerzas cuyas líneas de acción son paralelas.
- Vectores unitarios: son vectores cuyo módulo es la unidad.
- Vectores coplanarios: los vectores cuyas rectas de acción son coplanarias (situadas en un mismo plano).
5.3.3
Componentes de vectores
Un vector “V” en dos dimensiones puede separarse en sus dos componentes x
e y.
 |
| Figura 10: Componentes de un vector en un plano cartesiano. |
El vector “V” y sus componentes forman un ángulo.
 |
| Figura 11: Ángulo formado entre las componentes de un vector. |
Ahora, usando el teorema de Pitágoras podemos calcular la hipotenusa que
en este caso representa el módulo del vector “V”.
|V|2 = Vx2 + Vy2
Para calcular la dirección de un vector debemos apoyarnos en base a las
razones trigonométricas.
A continuación, se detalla la tabla de razones trigonométricas en un
triángulo rectángulo:

5.3.4
Sistemas de coordenadas
En
mecánica se tratan problemas relacionados con la descripción del movimiento de
un objeto en el espacio, por lo que se requiere un método para conocer la
posición de ese objeto. Para esto se definen los sistemas de coordenadas y
marcos de referencia.
Un
sistema de coordenadas usado para indicar las posiciones en el espacio consta
de:
1.
Un punto de referencia fijo O, llamado origen.
2.
Un conjunto de ejes o direcciones con una escala apropiada.
3.
Instrucciones sobre cómo identificar un punto en el espacio respecto al origen
y a los ejes.
5.3.4.0 Sistema de Coordenadas Geográficas
Puntos cardinales
N = Norte
S = Sur
E = Este
O = Oeste

¿Cuál es la diferencia entre latitud y longitud?
Latitud
La latitud, proporciona la localización de un lugar, en dirección Norte o Sur desde el ecuador y se expresa en medidas angulares que varían desde los 0 º

La longitud, proporciona la localización de un lugar, en dirección Este u Oeste desde el meridiano de referencia 0 º, o meridiano de Greenwich.

El más frecuente, conocido y casi obligado sistema de coordenadas empleado en los mapas es el llamado sistema geográfico o curvilíneo a base de latitudes y longitudes geográficas. El sistema, como tal fue concebido inicialmente en la Grecia antigua y subsiste sin alteraciones hasta nuestros días. El sistema es curvilíneo debido a que los círculos máximos que lo definen son líneas curvas.
Actividad: Estimar la longitud y latitud de un punto en el globo terrestre.
Latitud y Longitud
Actividad: Coloca correctamente las coordenadas de las siguientes ciudades.
Coordenadas en el globo terrestre
5.3.4.1 Sistema
de Coordenadas Rectangulares o Cartesianas
Uno de los sistemas más usados suele ser, el sistema de coordenadas
rectangulares. En este sistema un punto cualquiera se define con tres
coordenadas identificadas por (x,y,z), con
valores positivos en los ejes hacia la derecha, hacia arriba y saliendo del plano
respectivamente.
El espacio en el que normalmente vivimos de denomina espacio
tridimensional y para indicarlo usamos el símbolo 3D. En ocasiones solo basta
con dos o una coordenada para fijar la posición de un objeto, estos se
denominan espacio bidimensional (2D) y espacio unidimensional (1D).
 |
| Figura 12: Coordenadas rectangulares en un espacio tridimensional (3D) |
En el sistema rectangular para
un plano bidimensional existen dos ejes, el eje horizontal (x) que se denomina
abscisa y el eje vertical (y) que se denomina ordenada. Para representar
un punto cualquiera en el plano se denota de la siguiente manera: P (x,y).

Actividad: Ubicar los siguientes puntos desde el siguiente software matemático Geo-Gebra.
Geo-Gebra: Sistema rectangular
Ejemplos:
1. Ubicar los
siguientes puntos en el plano cartesiano:
A (-5,3) – B
(6,5) – C (4,5,-3,5) – D (0,0)

2. Calcular la distancia del punto A (1,-2) al punto B (3,-2)
Para calcular la distancia
entre dos puntos se aplica la siguiente fórmula:

3. Calcular el área
de un triángulo equilátero, si dos de sus vértices son los puntos P (5,-2) y R
(5,2)
En primer lugar, debemos calcular
el lado del triángulo usando la fórmula de distancia entre dos puntos.

4. Hallar la pendiente de una recta y el ángulo que pasa por los puntos: A (2,4) y B (6,8)
Para calcular la pendiente
entre dos puntos se usa la siguiente fórmula:

Nota:
Cuando la pendiente es igual a cero (m = 0), es paralela al eje x.
Cuando la pendiente es indefinida (m = ∞), es paralela al eje y.
Video: Vector Unitario
En este sistema de coordenadas un punto cualquiera se define como (r, θ),
donde r es la distancia desde el origen hasta el punto (x,y) generalmente se
llama radio, y θ el ángulo entre el eje x y r, por convección, se considera
positivo cuando va en sentido anti horario desde el eje x hacia r.
La relación entre las coordenadas polares y rectangulares o cartesianas
es:
x = r (cos θ)
y = r (sen θ)
r2 =x2 + y2
tan θ = y/x, para un espacio bidimensional
 |
| Figura 13: Coordenadas polares de un vector. |
Ejemplos:
1. Exprese el
siguiente punto en coordenadas cartesianas: P (5, 30º)
La relación para transformar
coordenadas polares a cartesianas es:
x = r (cos θ) = 5 (cos 30º)
= 4,33
y = r (sen θ) = 5 (sen 30º)
= 2,50
Por lo tanto, el punto en
coordenadas cartesianas será: P (4,33; 2,50)
2. Hallar la ecuación
polar del lugar geométrico cuya ecuación rectangular es:
x2 + y2 - 4x -
2y + 1 = 0
Podemos reemplazar x2 + y2 por r2, x por
r cos θ, y por r sen θ. Por lo tanto, la ecuación polar es:
r2 – 4 r cos θ –
2 r sen θ + 1 = 0
3. Hallar la ecuación rectangular del lugar geométrico cuya ecuación polar es: r (1 - cos θ) = 2

Video: Coordenadas polares
5.3.4.3
Sistemas de Coordenadas Cilíndricas
El sistema de coordenadas cilíndricas, es un sistema de coordenadas que extiende al sistema de coordenadas polares añadiendo una tercera coordenada que mide la altura de un punto sobre el plano, de la misma forma que el sistema de coordenadas cartesianas se extiende a tres dimensiones. La tercera coordenada se suele representar por h, haciendo que la notación de dichas coordenadas sea (r, θ, h).
Las coordenadas cilíndricas pueden convertirse en coordenadas cartesianas de la siguiente manera:
El sistema de coordenadas cilíndricas, es un sistema de coordenadas que extiende al sistema de coordenadas polares añadiendo una tercera coordenada que mide la altura de un punto sobre el plano, de la misma forma que el sistema de coordenadas cartesianas se extiende a tres dimensiones. La tercera coordenada se suele representar por h, haciendo que la notación de dichas coordenadas sea (r, θ, h).
Las coordenadas cilíndricas pueden convertirse en coordenadas cartesianas de la siguiente manera:
x = r (cos θ)
y = r (sen θ)
z = h
 |
| Figura 14: Coordenadas cilíndricas de un vector. |
Ejemplo:
1. Determine las
coordenadas cilíndricas de los puntos cuyas coordenadas rectangulares son:
A (3, -2, 1)
B (-7, 10, -6)


La suma de vectores es bien definida si ambos vectores pertenecen al mismo espacio vectorial, en física para que dos vectores puedan ser sumados deben estar aplicados en el mismo punto.
5.4.1 Método del Paralelogramo
 |
| Figura 15: Suma de dos vectores por el método del paralelogramo. |
Este método permite sumar vectores de dos en dos. Consiste en disponer gráficamente los dos vectores de manera que los orígenes de ambos coincidan en un punto, trazando rectas paralelas a cada uno de los vectores, en el extremo del otro y de igual longitud, formando así un paralelogramo. El vector resultante de la suma es la diagonal de dicho paralelogramo que parte del origen común de ambos vectores.
5.4.2 Método del Polígono
 |
| Figura 16: Suma de dos vectores por el método del polígono. |
Consiste en disponer gráficamente un vector a continuación de otro, ordenadamente: el origen de cada uno de los vectores coincidirá con el extremo del siguiente. El vector resultante es aquel cuyo origen coincide con el del primer vector y termina en le extremo del ultimo.
5.4.3 Método
analítico para suma y resta de vectores
Dado dos vectores libres:
A = (Ax) i + (Ay) j + (Az) k
B = (Bx) i + (By) j + (Bz) k
El resultado de la suma o diferencia de vectores será:
A ± B = (Axi + Ayj + Azk) ± (Bxi + Byj
+ Bzk)
Ordenando por componentes, tenemos:
A ± B = (Ax ± Bx) i + (Ay ± By) j + (Az ± Bz) k
5.4.4 Ley
del Coseno
Para sumar vectores de manera analítica, se necesita que estos se encuentren
en notación cartesiana o de vectores unitarios.
La
ley del coseno nos permite sumar analíticamente los vectores si están en
representación polar y evitarnos el cambio de notación.
Sean
los vectores A y B los mostrados en la figura,
encuentre A + B
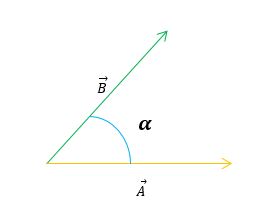 |
| Figura 17: Representación de dos vectores formando un ángulo α |
Si
realizamos el método gráfico de suma por paralelogramo, podremos observar el
vector resultado R y haciendo las proyecciones del vector B y colocamos en
función de la magnitud de B y la razón trigonométrica específica para el ángulo
α.
 |
| Figura 18: Método del paralelogramo |
Para
el triángulo formado por los puntos XYZ se puede notar que:
• |R| es la hipotenusa.
•
|B|sen α es el cateto opuesto; |B|cos α es el cateto adyacente.
Por
tanto, estableceremos un Teorema de Pitágoras para hallar la magnitud |B| y el ángulo θR respectivo.
 |
| Figura 19: Aplicación del teorema de Pitágoras |

Por
obvias razones, el ángulo θR es:

5.4.5 Ley
del Seno
Usando
el mismo gráfico para deducir la ley del coseno, trazamos una bisectriz en el
polígono inferior.
 |
| Figura 20: Método Paralelogramo y deducción de la Ley del Seno. |

6. Producto de vectores.
Hemos visto cómo la suma de vectores es
consecuencia natural de combinar desplazamientos, y sumaremos muchas otras
cantidades vectoriales posteriormente. También podemos expresar muchas
relaciones físicas de forma concisa usando producto de vectores. Los vectores
no son números ordinarios, así que no podemos aplicarles directamente la
multiplicación ordinaria. Definiremos dos tipos diferentes de productos de
vectores. El primero, llamado producto escalar, produce un resultado escalar.
El segundo, el producto vectorial, produce otro vector.
6.1 Producto escalar.
 |
| Figura 21: Proyección del vector A hacia B. |
El producto escalar de dos vectores A y B
se denota con A·B. Por esta notación, el producto escalar también se denomina
producto punto. Aun cuando A y B sean vectores, la cantidad A·B es un escalar.
El producto escalar de
dos vectores en un espacio euclidiano se define como el producto de sus módulos por el coseno del
ángulo θ que forman.
A · B = |A| |B| cos θ
Donde:
|A| = magnitud del vector A
|B| = magnitud del vector B
θ = ángulo entre los dos vectores
|A| = magnitud del vector A
|B| = magnitud del vector B
θ = ángulo entre los dos vectores
6.1.1
Ángulo entre dos vectores.
La expresión del producto escalar nos
permite calcular el coseno del ángulo que existe entre dos vectores.

6.1.2
Vectores ortogonales.
Dos vectores son ortogonales o
perpendiculares cunado el ángulo que forman entres los dos es un ángulo recto
(90º).
A · B = 0 A ┴ B
6.1.3
Vectores paralelos.
Dos vectores son paralelos
si el ángulo que forman entre ambos es de cero grados (0º) o de ciento ochenta
grados (180º).
A · B = |A| |B|
6.1.4 Cálculo de producto escalar usando sus
componentes.
Podemos calcular el producto
escalar A
· B directamente si conocemos las componentes x, y, z, de los vectores A y B.
En primer lugar, debemos saber los productos
escalares de los vectores unitarios (î,
ĵ, k).
î · î cos θ = (1) (1) cos (0º) = 1
ĵ · ĵ cos θ = (1) (1) cos (0º) = 1
k · k
cos θ= (1) (1) cos (0º) = 1
î · ĵ cos θ = (1)
(1) cos (90º) = 0
î · k cos θ = (1)
(1) cos (90º) = 0
ĵ · k cos θ = (1)
(1) cos (90º) = 0
Ahora, expresamos los
vectores A y B en términos de sus componentes y usamos los productos escalares
de los vectores unitarios.
A · B = (Ax î + Ay ĵ
+ Az k) · (Bx î
+ By ĵ + Bz k)
A · B = Ax Bx + Ay By + Az Bz
Por lo tanto, el producto escalar entre
dos vectores es la suma de los productos de sus respectivas componentes.
Video: Proyección vectorial.
Ejemplos:
1. En la siguiente
figura se muestran dos vectores. Obtenga el producto escalar A · B si las magnitudes
de los vectores son:
A = 4,00 y B = 5,00
A = 4,00 y B = 5,00
 |
| Figura 22: Dos vectores en dos dimensiones. |
Hay dos formas de calcular
el producto escalar.
- La primera consiste en usar las magnitudes de los vectores y el ángulo que forman entre ellos.
El ángulo entre los dos
vectores es:
ϕ = 130,0 º – 53,0 º = 77º
A
· B = |A| |B| cos θ
A
· B = (4,00) (5,00) cos 77º
A · B = 4,5
- La segunda consiste en usar las componentes de ambos vectores.
Ax = (4,00) cos 53,0 º =
2,41 Bx = (5,00) cos
130,0 º = - 3,21
Ay = (4,00) sen 53,0 º =
3,19 By = (5,00) sen
130,0 º = 3,83
Az = 0
Bz = 0
Las componentes z son cero, porque ambos vectores están en el plano xy.
A · B = Ax Bx + Ay By + Az Bz
A · B = (2,41) (-3,21) + (3,19) (3,83) + (0)
(0)
A · B = 4,5
2. Determine el
ángulo entre los dos vectores:
A = 2î + 3ĵ + k y
B =
-4î + 2ĵ - k
 |
| Figura 23: Dos vectores en tres dimensiones. |
Calculamos
el módulo de cada vector:

Luego, calculamos el producto punto entre ambos vectores:
A · B = Ax Bx + Ay By + Az Bz
A · B = (2) (-4) + (3) (2) + (1) (-1)
A · B = -3
Usamos la fórmula para
calcular el ángulo entre dos vectores:

Video: Vectores paralelos o perpendiculares.
6.2 Producto vectorial
El producto vectorial entre
dos vectores da como resultado un vector, se lee A cruz B, y se define como:
C = A x B
|C| = |A| |B| sen θ
Donde:
|A| = magnitud del vector A
|B| = magnitud del vector B
C = vector perpendicular al
plano formado por A y B
θ = ángulo entre los dos
vectores
El producto vectorial se
calcula resolviendo el siguiente determinante:

Aplicado a vectores
unitarios, se obtiene que:
î x î = ĵ x ĵ = k x k = 0
î x ĵ = k ĵ x k
= î k x î = ĵ
Ejemplo:
1. El vector A
tiene una magnitud de 6 unidades y está sobre el eje +x. El vector B tiene una
magnitud de 4 unidades y está en el plano xy formando un ángulo de 30 º con el
eje +x (ver figura).
Calcule el
producto cruz A x B.
 |
| Figura 24: Vectores A y B y su producto vectorial C = A x B |
- La primera consiste, en usar la fórmula de producto cruz y luego la regla de la mano derecha:
|A x B| = |A| |B| sen θ
|A x B| = (6) (4) sen 30 º
|A x B| = 12
Por la regla de la mano
derecha A x B, tiene la dirección del eje +z, por lo tanto:
A x B = 12 k
- La segunda manera consiste en usar determinantes:
Debemos calcular las componentes de los dos vectores en coordenadas
rectangulares.
Ax = 6 Bx = 4 cos 30º = 3,46
Ay = 0 By = 4
sen 30º = 2,00
Az = 0 Bz =
0
A x B = î (0*0 – 0*2,00) – ĵ (6*0 – 0*3,46) + k (6*2,00 – 0*3,46)
A x B = 0î - 0ĵ + 12k
A x B = 12 k
Video: Producto escalar y producto vectorial
7. Ejercicios / Problemas
- Enlace:Operaciones de vectores.
- Enlace:Ejercicios de conversión.
- Enlace:Problemas resueltos - Vectores
- Enlace:Problemas resueltos - Vectores en 3D Producto escalar y vectorial
- Enlace: Problemas propuestos - Vectores